
Sitemize üye olarak beğendiğiniz içerikleri favorilerinize ekleyebilir, kendi ürettiğiniz ya da internet üzerinde beğendiğiniz içerikleri sitemizin ziyaretçilerine içerik gönder seçeneği ile sunabilirsiniz.
Sitemize üye olarak beğendiğiniz içerikleri favorilerinize ekleyebilir, kendi ürettiğiniz ya da internet üzerinde beğendiğiniz içerikleri sitemizin ziyaretçilerine içerik gönder seçeneği ile sunabilirsiniz.
Üyelerimize Özel Tüm Opsiyonlardan Kayıt Olarak Faydalanabilirsiniz

-
0
Mutlu
-
 0
0
Eğlenmiş
-
 0
0
Şaşırmış
-
 0
0
Kızgın
-

Üzgün

Örümcek robotlar geliyor – CHIP Online





Tokyo Üniversitesi’nden araştırmacılar, kabuslarımıza girebilecek kadar korkunç bir konsept bakış açısı: Hem sürünebilen hem de uçabilen robot örümcekler.
Gerçek örümcekler nasıl uçacaklarını buldular. Ağları ile ultra hafif ipek maaşler örüp rüzgarda süzülerek uçabiliyorlar. Bu sayede büyük mesafeleri sekiz ayak üzerinde yürümekten bile çok daha hızlı katlayabiliyorlar ve ayrıca zorlu arazileri geçmek kolaylaşıyor. Peki ama bu yaklaşım bir robot ile gerçekleştirmek mümkün mü?
Uçan bir örümcek robotu yapmak için onu aktif olarak korumakla donatmak gereklidir. Sorun şu ki, çok bacaklı bir robotu tek tek uzuv segmentleri üzerinde gezinmesine yetecek kadar servo motor ve batarya ile donatmak zaten çok büyük bir iş. Boston Dynamics’in etkileyici yeteneği bir robot köpeği olan SPOT, en hafif konfigürasyonunda neredeyse 70 kilo ağırlığında. Bunun üzerine uçmasını sağlayacak kadar motor ve itici içermesi, daha da ağır bir robotla sonuçlanacak ve bu da şarj edilmeden önce ne kadar süre çalışabileceğini etkileyebilir.
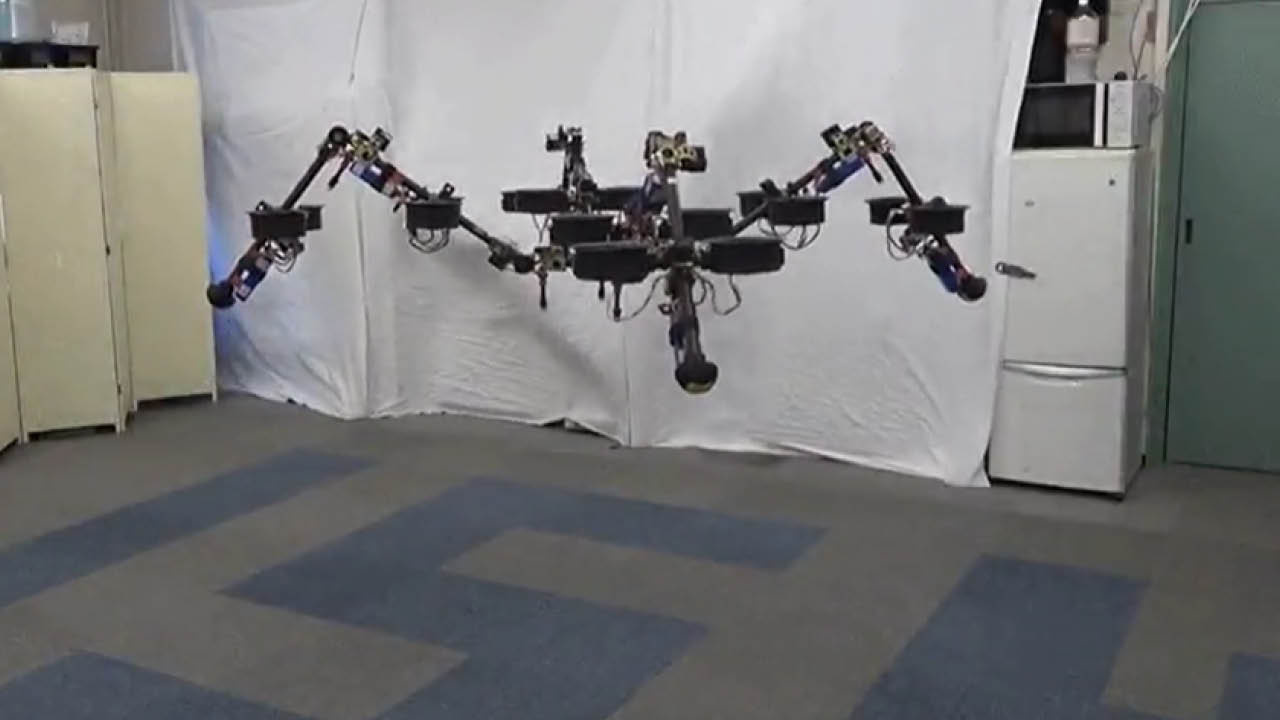
Tokyo Üniversitesi, bu imkansız gibi görünen görevi farklı bir yaklaşımla başarmış gibi görünüyor. SPIDAR olarak nitelendirdikleri 33 kiloluk robotun kendi başına ayakta durması için yeterince güçlü olmayan uzantılarında hafif ama ağırlığı zayıf servolar kullanıyor. Bu, onu bir jet motoru olmadan kaldırabilecek kadar hafif tutuyor, ancak örümceğin sadece dik durmak için sürekli bir şekilde bir sonuca ulaşması gerektiği anlamına geliyor.
SPIDAR’ın bacak hareketleri, robotun sekiz bacak segmentini döndürmek, hareket gerçekleştirmek ve elde etmek için çıkartmak, her bacakta dörder tane olmak üzere 16 manevra kabiliyetili itici tarafından destekleniyor. Tüm iticiler ve hareket hareketleri düzgün bir şekilde sahipleniyorlar, SPIDAR yükselebiliyor kalkabiliyor ve yürüyebiliyor, ancak şu anda çok yavaş ve çok yüksek sesle hareket ediyor.
Hepsi aşağı doğru yönlendirildiğinde, bu 16 itici aynı zamanda SPIDAR’ı uçurmaya yetecek kadar kaldırma zorlamaları gerçekleştirdi ve pillerini tüketmeden önce toplam dokuz dakika boyunca uçabiliyor ya da 18 dakikaya kadar yürüyebiliyor. Bu süre henüz pratik bir iş için yeterli değil ama aşağıdaki videonun da gösterdiği gibi SPIDAR bu noktada henüz rafine olmayan bir prototip.
SPIDAR’ın nasıl çalıştığını aşağıdaki videodan izleyebilirsiniz:
Benzer İçerikler




- Site İçi Yorumlar
TREND İÇERİKLER

Windows 11 yakında AI destekli efektler kazanabilir…
0
6 Mart 2023

ChatGPT yalan söylüyor – CHIP Online
0
11 Mart 2023


Yorum Yaz